
无人工介入稳定运行
赋能的机器人产品
服务的企业用户
实现落地的场景
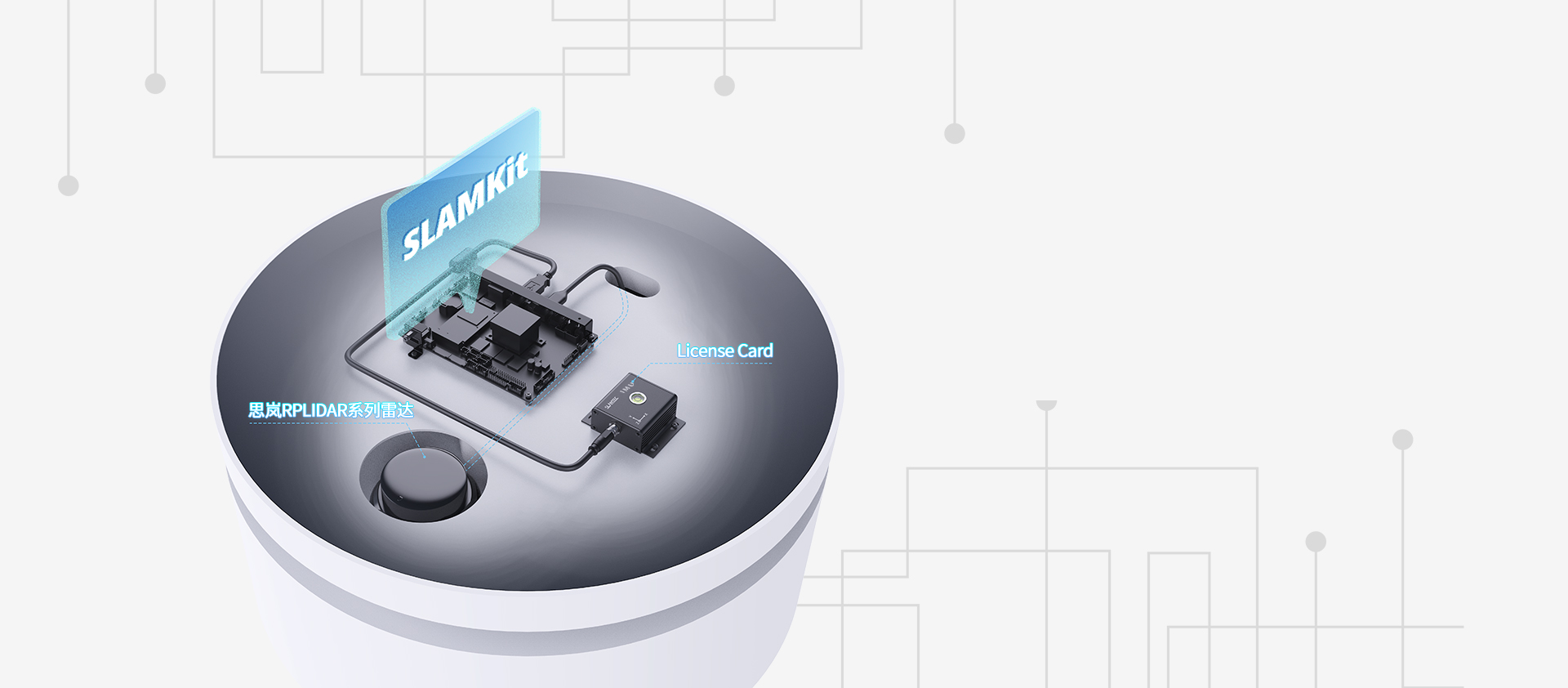
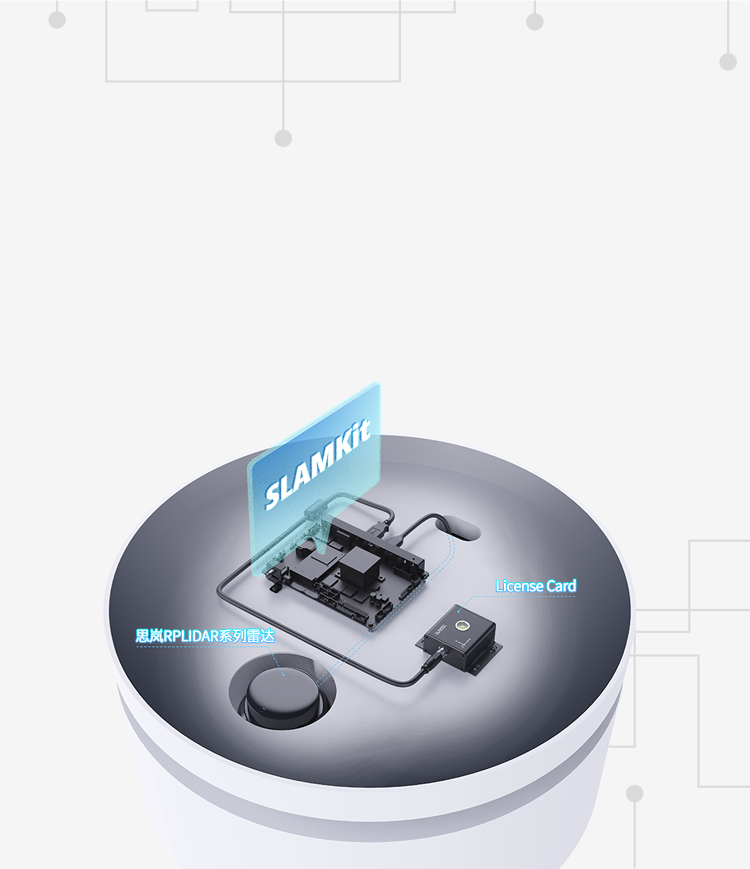
SLAMKit是业内首个独立提供定位与建图功能的商业化解决方案,以领先业界的扩展性和稳定性赋能移动机器人产业链。可以通过软件授权的方式嵌入运行在机器人的主控器中,并为机器人提供环境建模与自主定位的能力,客户可以通过高度标准化的软件接口快速构建出个性化的机器人应用程序。

超大场景地图构建
高精度地图分辨率
实时定位误差(典型值)
定位稳定性

针对具有环境动态多变、相似度高和特征贫瘠等特点的应用场景,拥有出众的鲁棒性定位能力。
独特的多源融合定位框架,支持多种定位源的接入与动态搭配,以及适用于不同工况下的定位模式切换。
引入传感器增强技术、人工标的物辅助技术、人工标识元素辅助技术和动态地图更新技术等多种先验知识,提高定位的普适性与特殊场景下高标准定位需求的适配性。
通过高度优化的软件架构和算法实现,将SLAMKit处于工作模式下的计算资源消耗降低到业内同类功能软件的50%,降低客户端对硬件设备的选型要求。
支持500000㎡-1200000㎡大场景地图构建,轻松应对。
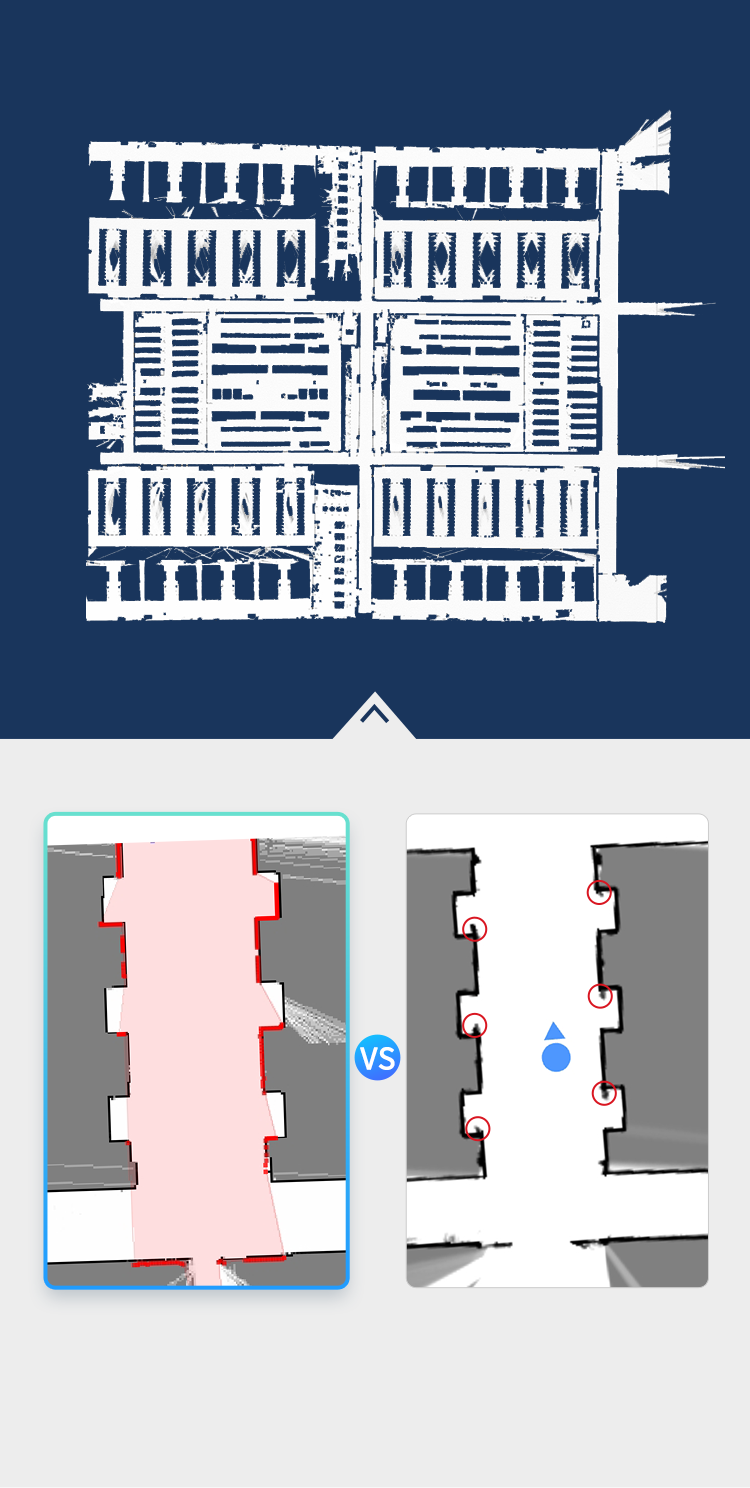
采用SharpEdge™地图优化技术,构建1.5cm的高精度地图,无需二次优化修饰。
拥有自主式和辅助式闭环检测与调整策略,以更高的成功率构建出更加可靠的环境建图。
在地图构建的过程中提供参数调整的接口,保障地图的构建质量。
提供C++、Java SDK、ROS、Restful API 等SDK工具包,助力客户快速进行二次开发。
提供了具备离线建图、多地图拼接、多层地图融合、地图元素编辑等丰富功能的工具集合,为客户的场景部署降本增效。
通过云端服务、可视化交互工具和通信网络的赋能,实现机器人的近场和远程连接,让客户随时随地监控机器人的运行状态。

细节完整,无需二次修饰
边角毛刺,不平整

SLAMKit是一个功能和服务的集合体,可以通过软件授权的方式为客户提供建图、定位和全套工具链的基础上,还为客户提供了贯穿产品全生命周期的多样化支撑服务,加速客户产品的落地应用。
SLAMKit可以运行在主流intel和arm架构的嵌入式平台上,并适配常用的ubuntu系统。
SLAMKit抽象出了丰富的软件接口,以此衍生出C++、JAVA、Restful API和ROS等多种SDK工具包,并提供了完整的文档说明及示例代码。
SLAMKit针对家用、清洁、工业、配送和巡检等多种类型场景下的SLAM问题进行了适配,通过各异化参数配置保证机器人运行的稳定性。
SLAMKit提供了标准的性能测试和评估方法,以及满足运行需求的性能标准,帮助客户快速验证个性化机器人产品。
SLAMKit配套了可视化交互工具Robostudio,可以让客户实时监控机器人的运行状态并通过多样化的部署工具集成帮助客户加快部署时间。
多年积累的场景化部署经验文档及一对一的部署教学助力新手客户快速熟悉机器人的部署流程。
SLAMKit配套了基于云端的部署服务,在实现部分元素编辑的同时协助客户保存历史数据。
SLAMKit搭载了完整的运行数据记录系统及离线数据回放系统,保障了客户现场问题的快速响应与解决。
SLAMKit配套了基于云端的运维服务,可以远程连接机器进行异常恢复。
针对重点客户进行专人支持,协助客户完成重点场景的应用落地。
我们已经将SLAMKit以软件授权的方式接入到客户的系统和业务场景中去,实现高效可靠、稳定的SLAM定位与建图功能,帮助场景端更好的实现降本增效,效率最大化。

某商扫客户通过SLAMKit™软件授权的方式让产品落地提速50%,抢占市场先机
50%产品落地提速
商用清扫环境通常要比家用复杂很多,主要表现在场景面积大、环境变化快、地形复杂等方面。思岚提供的SLAMKit软件授权产品,让我们的产品在机场、写字楼、地铁站等复杂超大场景下实现快速落地,产品由原来的180天研发周期缩短50%,帮助我们抢占市场先机。

某巡检客户通过SLAMKit™软件授权的方式让商品补货响应速度提升了40%
40%补货响应速度提升
思岚的软件授权产品帮助我们的产品在多变场景下实现了高精度定位,快速且准确地完成货物巡检,存储运营中心能实时地获得补货提醒,让商品补货响应速度提升了40%,增加了当日售出的商品数量。同时,我太喜欢思岚的SDK了,简直让开发变成了一件很简单的事情!

某AGV客户通过SLAMKit™软件授权的方式经受住了多工况、多调度考验,任务达成率99%
99%任务达成率
思岚的软件授权产品让我们的AGV机器人在面对多工况、多调度的定位切换下没有被“绕晕”,任务达成率99%,可靠性很高。而且可以不改变我们原有的操作系统,在研发、部署和运维等机器人必经的阶段大大降低了时间和金钱成本。
某送餐客户通过SLAMKit™软件授权的方式降低客诉,机器稳定运行提升200%
200%机器稳定运行提升
原本我们的一台机器人最多稳定运行1个月,现在接入了思岚的软件授权产品,最长3个月无需人工干预,实现自主作业,大大降低了客诉。同时,他们的支持和响应速度也很快,能够高效解决问题。


思岚科技官方微信


无人工介入稳定运行
赋能的机器人产品
服务的企业用户
实现落地的场景
SLAMKit是业内首个独立提供定位与建图功能的商业化解决方案,以领先业界的扩展性和稳定性赋能移动机器人产业链。可以通过软件授权的方式嵌入运行在机器人的主控器中,并为机器人提供环境建模与自主定位的能力,客户可以通过高度标准化的软件接口快速构建出个性化的机器人应用程序。

超大场景地图构建
高精度地图分辨率
实时定位误差(典型值)
定位稳定性



针对具有环境动态多变、相似度高和特征贫瘠等特点的应用场景,拥有出众的鲁棒性定位能力。
独特的多源融合定位框架,支持多种定位源的接入与动态搭配,以及适用于不同工况下的定位模式切换。
引入传感器增强技术、人工标的物辅助技术、人工标识元素辅助技术和动态地图更新技术等多种先验知识,提高定位的普适性与特殊场景下高标准定位需求的适配性。
通过高度优化的软件架构和算法实现,将SLAMKit处于工作模式下的计算资源消耗降低到业内同类功能软件的50%,降低客户端对硬件设备的选型要求。
支持500000㎡-1200000㎡大场景地图构建,轻松应对。
采用SharpEdge™地图优化技术,构建1.5cm的高精度地图,无需二次优化修饰。
拥有自主式和辅助式闭环检测与调整策略,以更高的成功率构建出更加可靠的环境建图。
在地图构建的过程中提供参数调整的接口,保障地图的构建质量。
提供C++、Java SDK、ROS、Restful API 等SDK工具包,助力客户快速进行二次开发。
提供了具备离线建图、多地图拼接、多层地图融合、地图元素编辑等丰富功能的工具集合,为客户的场景部署降本增效。
通过云端服务、可视化交互工具和通信网络的赋能,实现机器人的近场和远程连接,让客户随时随地监控机器人的运行状态。
细节完整,无需二次修饰
边角毛刺,不平整

SLAMKit是一个功能和服务的集合体,可以通过软件授权的方式为客户提供建图、定位和全套工具链的基础上,还为客户提供了贯穿产品全生命周期的多样化支撑服务,加速客户产品的落地应用。
SLAMKit可以运行在主流intel和arm架构的嵌入式平台上,并适配常用的ubuntu系统。
SLAMKit抽象出了丰富的软件接口,以此衍生出C++、JAVA、Restful API和ROS等多种SDK工具包,并提供了完整的文档说明及示例代码。
SLAMKit针对家用、清洁、工业、配送和巡检等多种类型场景下的SLAM问题进行了适配,通过各异化参数配置保证机器人运行的稳定性。
SLAMKit提供了标准的性能测试和评估方法,以及满足运行需求的性能标准,帮助客户快速验证个性化机器人产品。
SLAMKit配套了可视化交互工具Robostudio,可以让客户实时监控机器人的运行状态并通过多样化的部署工具集成帮助客户加快部署时间。
多年积累的场景化部署经验文档及一对一的部署教学助力新手客户快速熟悉机器人的部署流程。
SLAMKit配套了基于云端的部署服务,在实现部分元素编辑的同时协助客户保存历史数据。
SLAMKit搭载了完整的运行数据记录系统及离线数据回放系统,保障了客户现场问题的快速响应与解决。
SLAMKit配套了基于云端的运维服务,可以远程连接机器进行异常恢复。
针对重点客户进行专人支持,协助客户完成重点场景的应用落地。
我们已经将SLAMKit以软件授权的方式接入到客户的系统和业务场景中去,实现高效可靠、稳定的SLAM定位与建图功能,帮助场景端更好的实现降本增效,效率最大化。

某商扫客户通过SLAMKit™软件授权的方式让产品落地提速50%,抢占市场先机
50%产品落地提速
商用清扫环境通常要比家用复杂很多,主要表现在场景面积大、环境变化快、地形复杂等方面。思岚提供的SLAMKit软件授权产品,让我们的产品在机场、写字楼、地铁站等复杂超大场景下实现快速落地,产品由原来的180天研发周期缩短50%,帮助我们抢占市场先机。

某巡检客户通过SLAMKit™软件授权的方式让商品补货响应速度提升了40%
40%补货响应速度提升
思岚的软件授权产品帮助我们的产品在多变场景下实现了高精度定位,快速且准确地完成货物巡检,存储运营中心能实时地获得补货提醒,让商品补货响应速度提升了40%,增加了当日售出的商品数量。同时,我太喜欢思岚的SDK了,简直让开发变成了一件很简单的事情!

某AGV客户通过SLAMKit™软件授权的方式经受住了多工况、多调度考验,任务达成率99%
99%任务达成率
思岚的软件授权产品让我们的AGV机器人在面对多工况、多调度的定位切换下没有被“绕晕”,任务达成率99%,可靠性很高。而且可以不改变我们原有的操作系统,在研发、部署和运维等机器人必经的阶段大大降低了时间和金钱成本。
某送餐客户通过SLAMKit™软件授权的方式降低客诉,机器稳定运行提升200%
200%机器稳定运行提升
原本我们的一台机器人最多稳定运行1个月,现在接入了思岚的软件授权产品,最长3个月无需人工干预,实现自主作业,大大降低了客诉。同时,他们的支持和响应速度也很快,能够高效解决问题。
思岚科技官方微信




