
| 外观 |  |
 |
|||
| 型号 | S2L | S2 | S2P | S2E | |
| 测量半径 | 90% 反射率 | 0.05m-18m | 0.05m-30m | 0.05m-50m | 0.05m-30m |
| 10% 反射率 | 0.05m-8m | 0.05m-10m | 0.05m-15m | 0.05m-10m | |
| 采样频率 | 32k | 32k | 32K | 32k | |
| 扫描频率(典型值) | 10Hz | 10Hz | 10Hz | 10Hz | |
| 角度分辨率(典型值) | 0.12° | 0.12° | 0.12° | 0.12° | |

采用DTOF(Direct Time of Flight)飞行时间测距技术,保证激光雷达测量精度在任何距离下均表现出色,同时能有效检测出低反射率、镜面反射甚至高透射率物体。
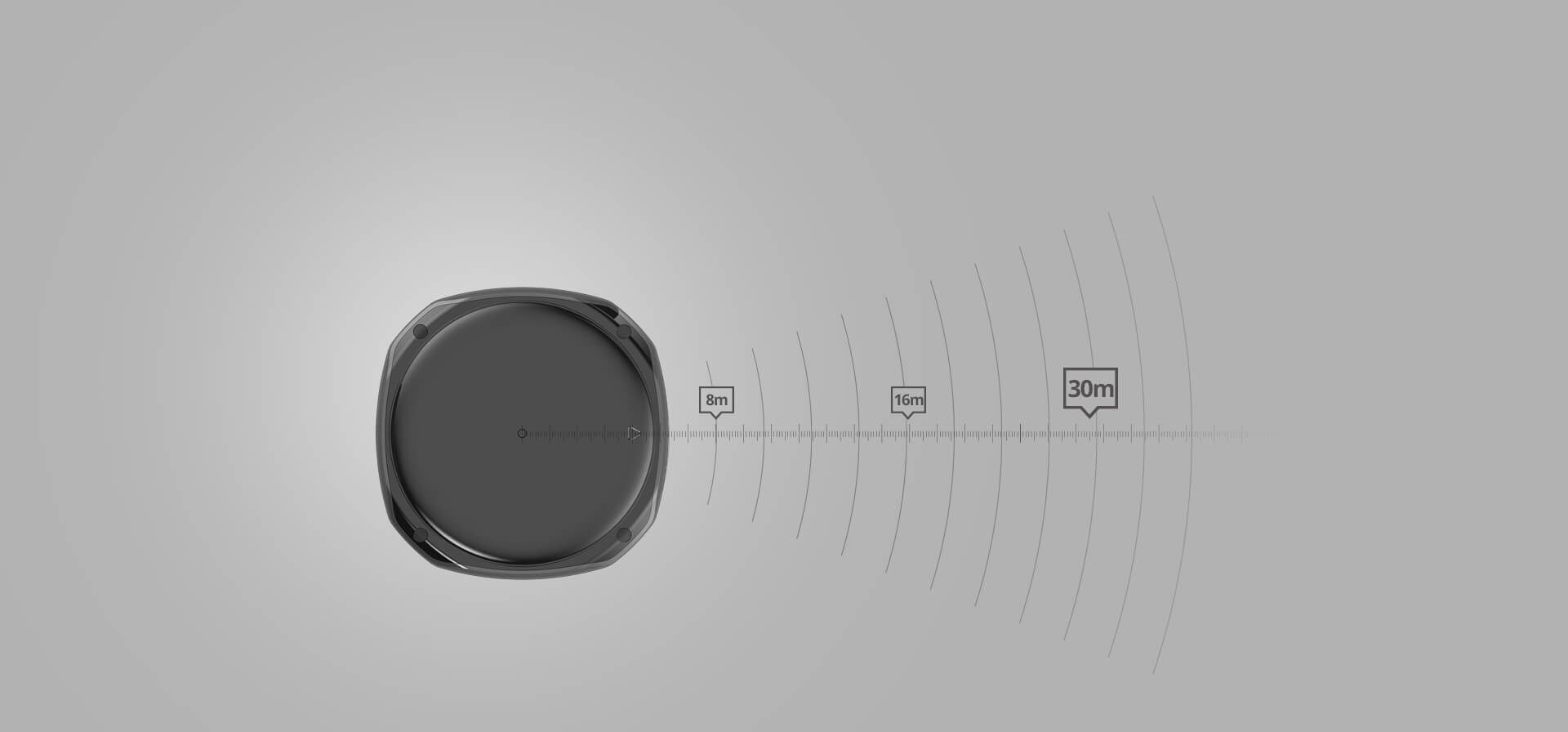
测量半径达30-50米,满足酒店、餐饮、商场、办公楼等商用场景机器人应用需求。
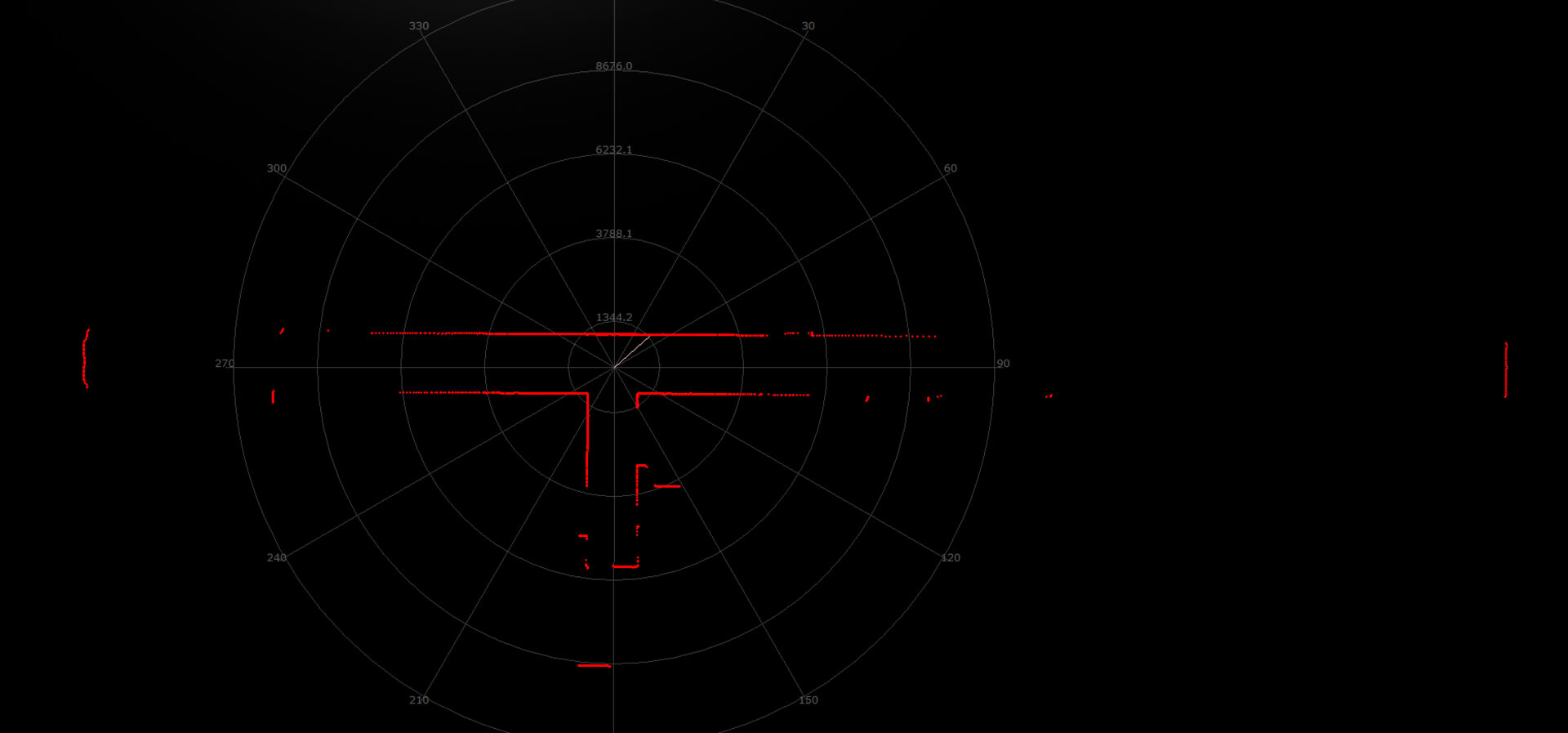
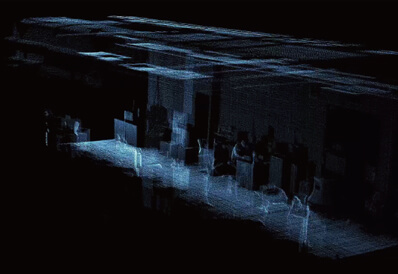
全面改进内部光学和算法系统,采样频率高达32000次/秒,输出高质量点云数据,捕捉更多环境细节。

有效抵抗室内环境光和室外强光干扰,在室外80Klux的强光下,实现稳定测距与高精度建图。

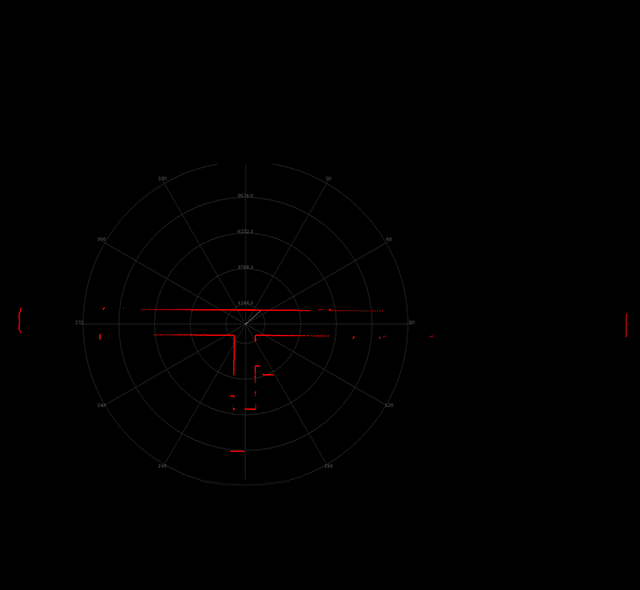
对于小物体、不同反射率物体检出率高,如桌角、深色、镜面等高反物体,都可以得到稳定的精确测量数据。

雷达顶部扫描区域高度仅为18mm,小巧易内嵌,可大幅缩小机器人雷达区域开口高度。不影响机器人整体外观设计,具备超高线条感与科技感。

接口与RPLIDAR A系列雷达接口一致,完美兼容原有A系列激光雷达机器人产品。

S2、S2L、S2P串口版本
S2E(支持32k采樣頻率下全量程+強度信號輸出)網口版本

IP65防护等级, 配合封闭式独立外罩,全面保护内部旋转机构,规避外界干扰,保证稳定的工作环境,满足工业场景应用。


采用调制脉冲式的低功率红外线激光器发射光源,符合Class 1激光器安全标准,达到人眼安全级别。

服务机器人导航避障
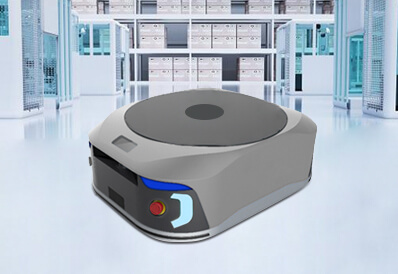
AGV小车障碍物检测与规避

停车场车位监测

低速无人车环境感知与自主移动

多点触碰与大屏互动

无人机测绘与避障

ROS小车/教育小车建图、避障
环境扫描与3D重建


思岚科技官方微信

| 外观 |  |
 |
|||
| 型号 | S2L | S2 | S2P | S2E | |
| 测量半径 | 90% 反射率 | 0.05m-18m | 0.05m-30m | 0.05m-50m | 0.05m-30m |
| 10% 反射率 | 0.05m-8m | 0.05m-10m | 0.05m-15m | 0.05m-10m | |
| 采样频率 | 32k | 32k | 32K | 32k | |
| 扫描频率(典型值) | 10Hz | 10Hz | 10Hz | 10Hz | |
| 角度分辨率(典型值) | 0.12° | 0.12° | 0.12° | 0.12° | |

采用DTOF(Direct Time of Flight)飞行时间测距技术,保证激光雷达测量精度在任何距离下均表现出色,同时能有效检测出低反射率、镜面反射甚至高透射率物体。
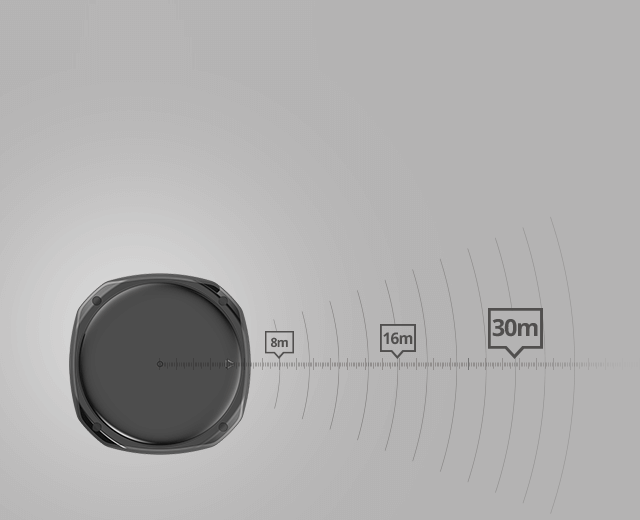
测量半径达30-50米,满足酒店、餐饮、商场、办公楼等商用场景机器人应用需求。
全面改进内部光学和算法系统,采样频率高达32000次/秒,输出高质量点云数据,捕捉更多环境细节。

有效抵抗室内环境光和室外强光干扰,在室外80Klux的强光下,实现稳定测距与高精度建图。

对于小物体、不同反射率物体检出率高,如桌角、深色、镜面等高反物体,都可以得到稳定的精确测量数据。
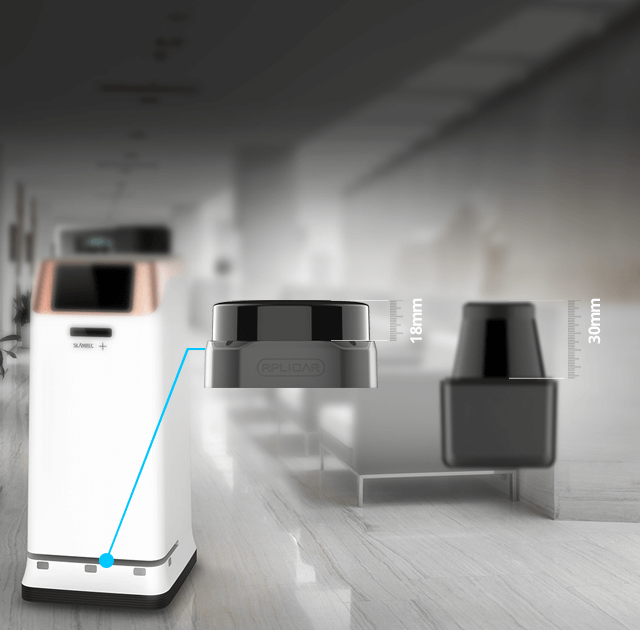
雷达顶部扫描区域高度仅为18mm,小巧易内嵌,可大幅缩小机器人雷达区域开口高度。不影响机器人整体外观设计,具备超高线条感与科技感。

接口与RPLIDAR A系列雷达接口一致,完美兼容原有A系列激光雷达机器人产品。

S2提供串口、網口多種通信接口方式,方便用戶在多種環境下使用。
IP65防护等级, 配合封闭式独立外罩,全面保护内部旋转机构,规避外界干扰,保证稳定的工作环境,满足工业场景应用。
采用调制脉冲式的低功率红外线激光器发射光源,符合Class 1激光器安全标准,达到人眼安全级别。
服务机器人导航避障
AGV小车障碍物检测与规避
停车场车位监测
低速无人车环境感知与自主移动
多点触碰与大屏互动
无人机测绘与避障
ROS小车/教育小车建图、避障
环境扫描与3D重建
思岚科技官方微信



